Beyond Robotix
Micro CAN Node Development set
Micro CAN Node Development set
Couldn't load pickup availability
The Beyond Robotix Micro CAN Node allows you to create production-grade DroneCAN enabled products with minimal effort. Whether you're integrating peripherals on custom PCBs or prototyping new DroneCAN sensors, the Micro CAN Node is the best option for businesses, hobbyists and educational institutes.
Why You'll Love It
The development board makes it easy to prototype new applications and when you're ready to get everything integrated on a PCB the high density connector lets you mount the Micro CAN Node with no soldering or messy wires. Plug and Play support for Arduino DroneCAN lets you set up sensors not supported by AP_Periph without mountains of boilerplate code.
This set contains a Micro CAN Node and a Development Board, the Micro CAN Node is available to purchase separately here.
We recommend this set is bought with an STLINK V3, unless you have the exact "STLINKV3 Minie". Without it, custom application development is much harder and time consuming. If you're hoping to use a STLINK V2, you'll need the right cable to connect into the debug header.
Product Details
Product Details
- Compatibility: Works with AP_Periph and Arduino DroneCAN
- Connectors: Pixhawk and Cube compatible JST-GH connectors
- Materials: Durable components built to withstand rigorous use
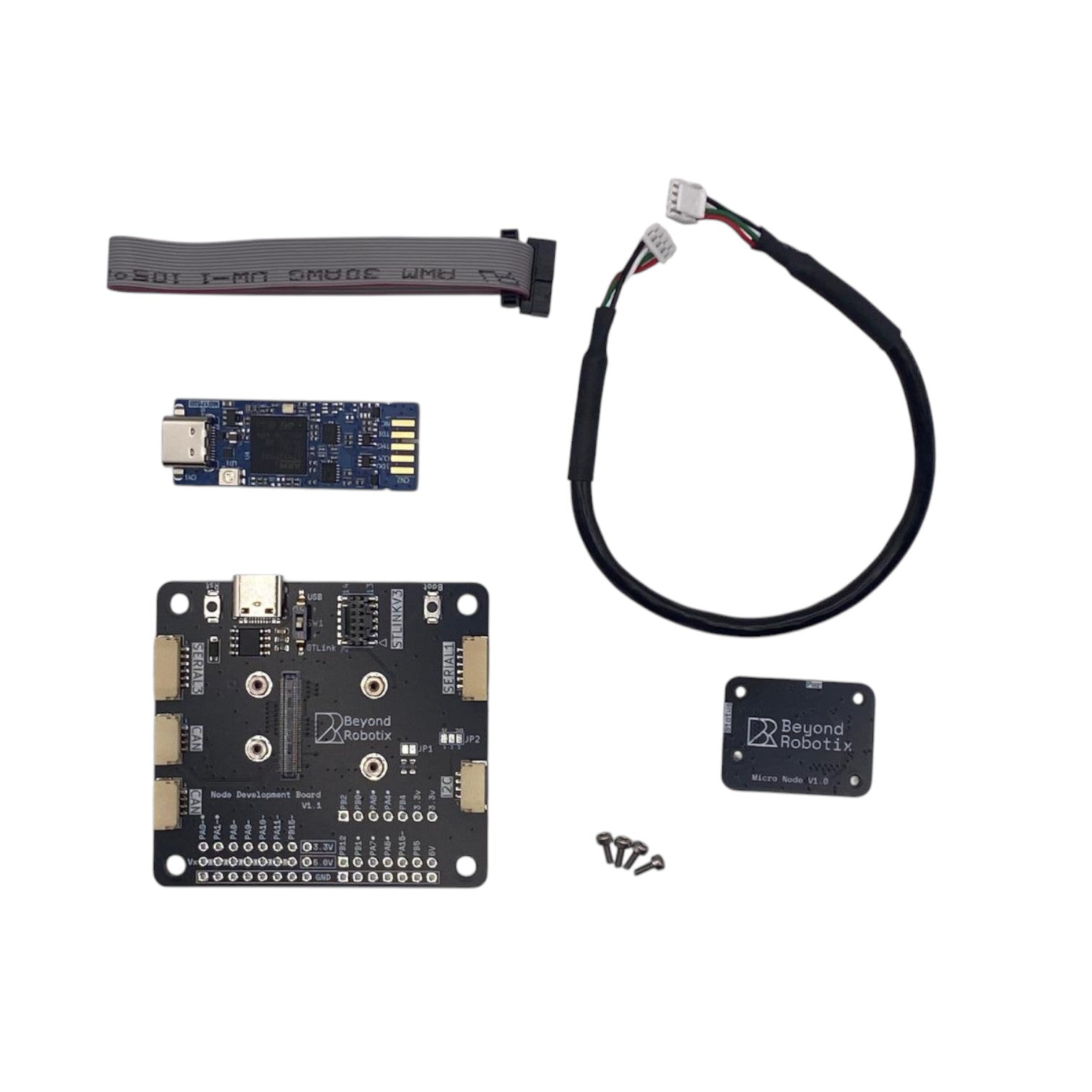
What's Included
What's Included
- Micro CAN Node
- Micro CAN Node Development Board
- Quick start guide
- 1 year warranty
- STLINK MINIE V3
- Debugger cable to go between STLINK and the board
Specifications
Specifications
Micro CAN Node
- Mass: 2g
- Dimensions: 30x20mm
- High reliability connector & mechanical fixing
- Screw heads accessible from the top of the board
- STM32L431CCU6 processor, 256kB of flash
- 200mA LDO - Any high power items should not use the 3.3V output
- 750mA input fuse
- Input diode
- Optional 120 ohm termination resistor via solder pad
- Status LED
- AP_periph firmware support
- Arduino DroneCAN support
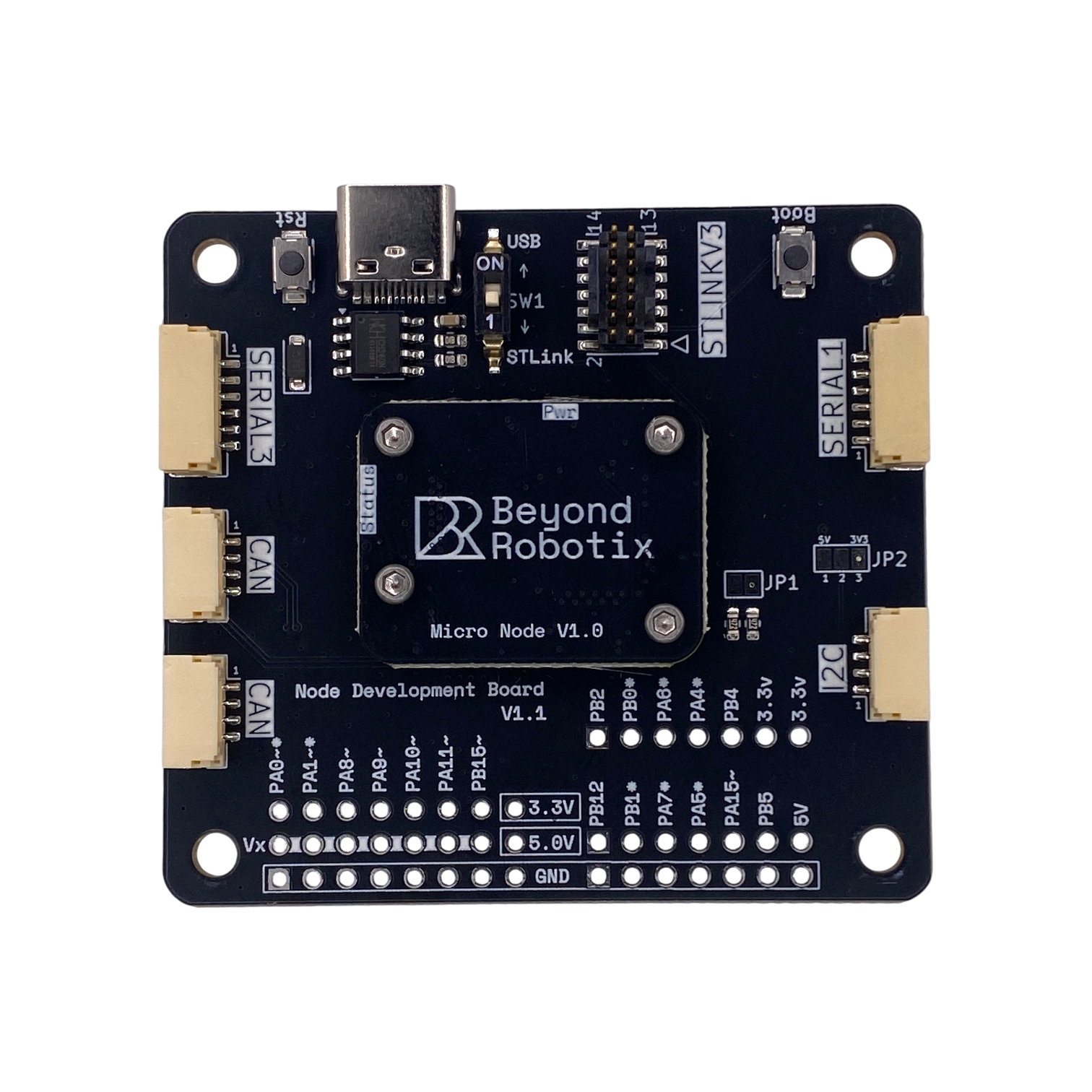
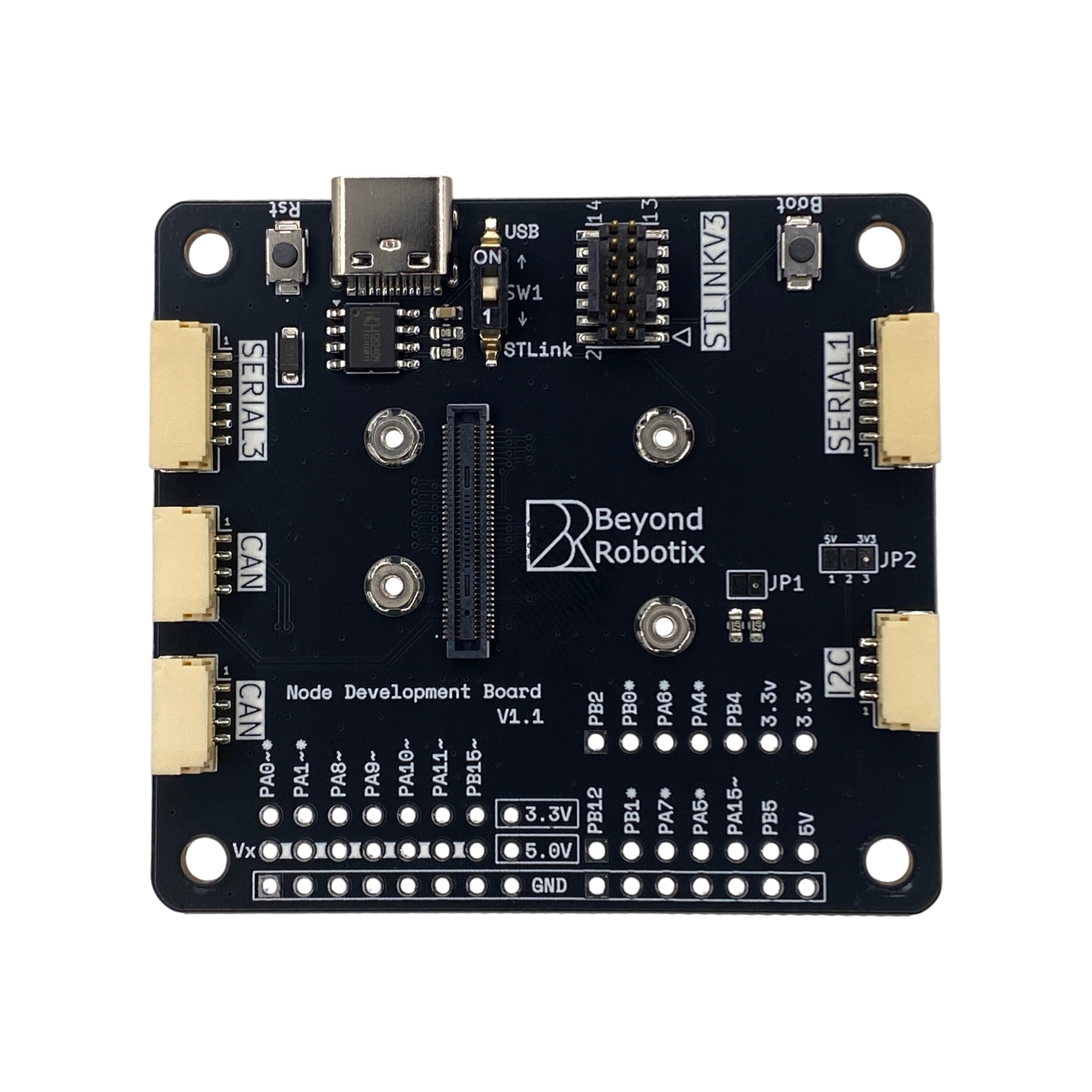
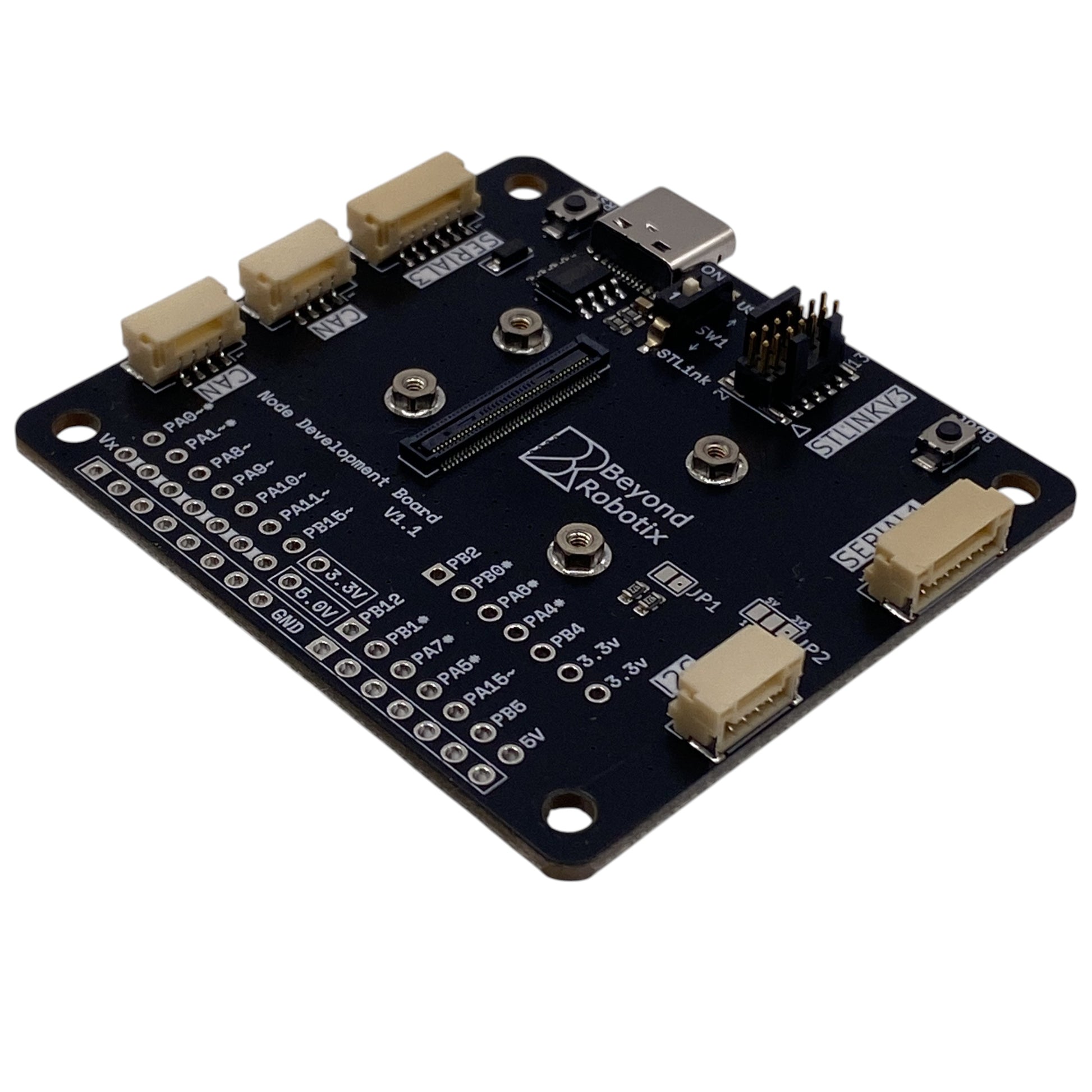
Development Board
- Mass: 12g
- Dimensions: 54x53mm
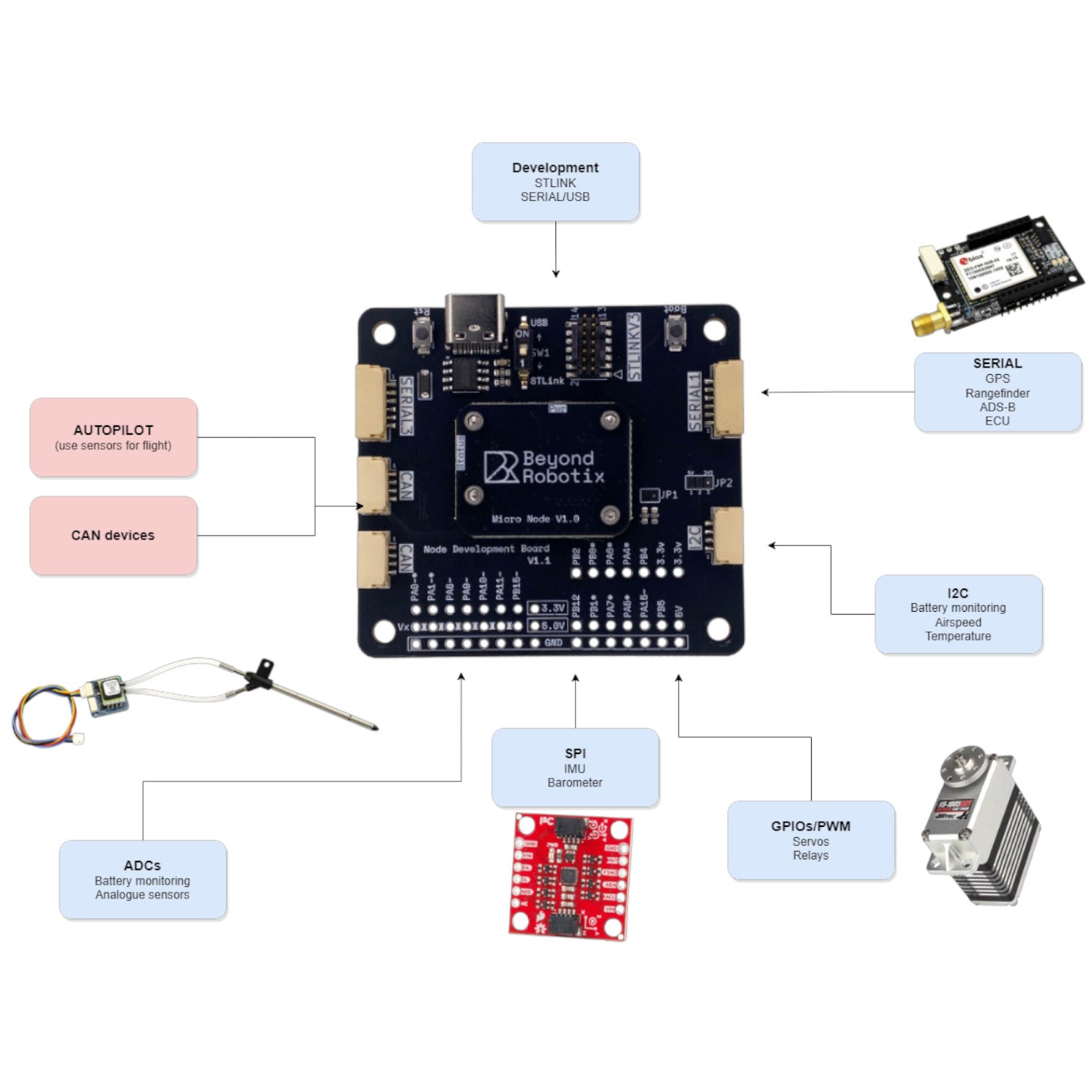
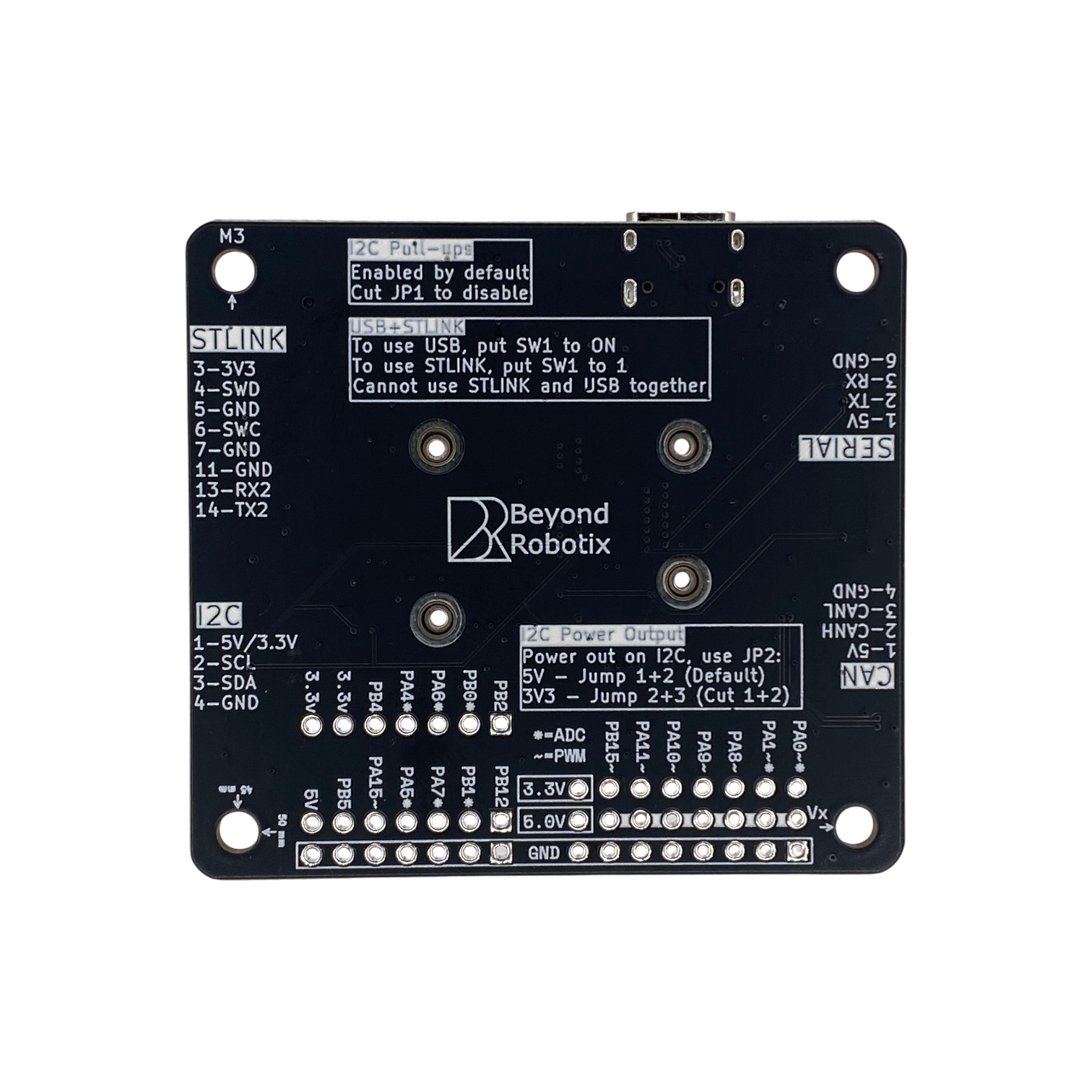
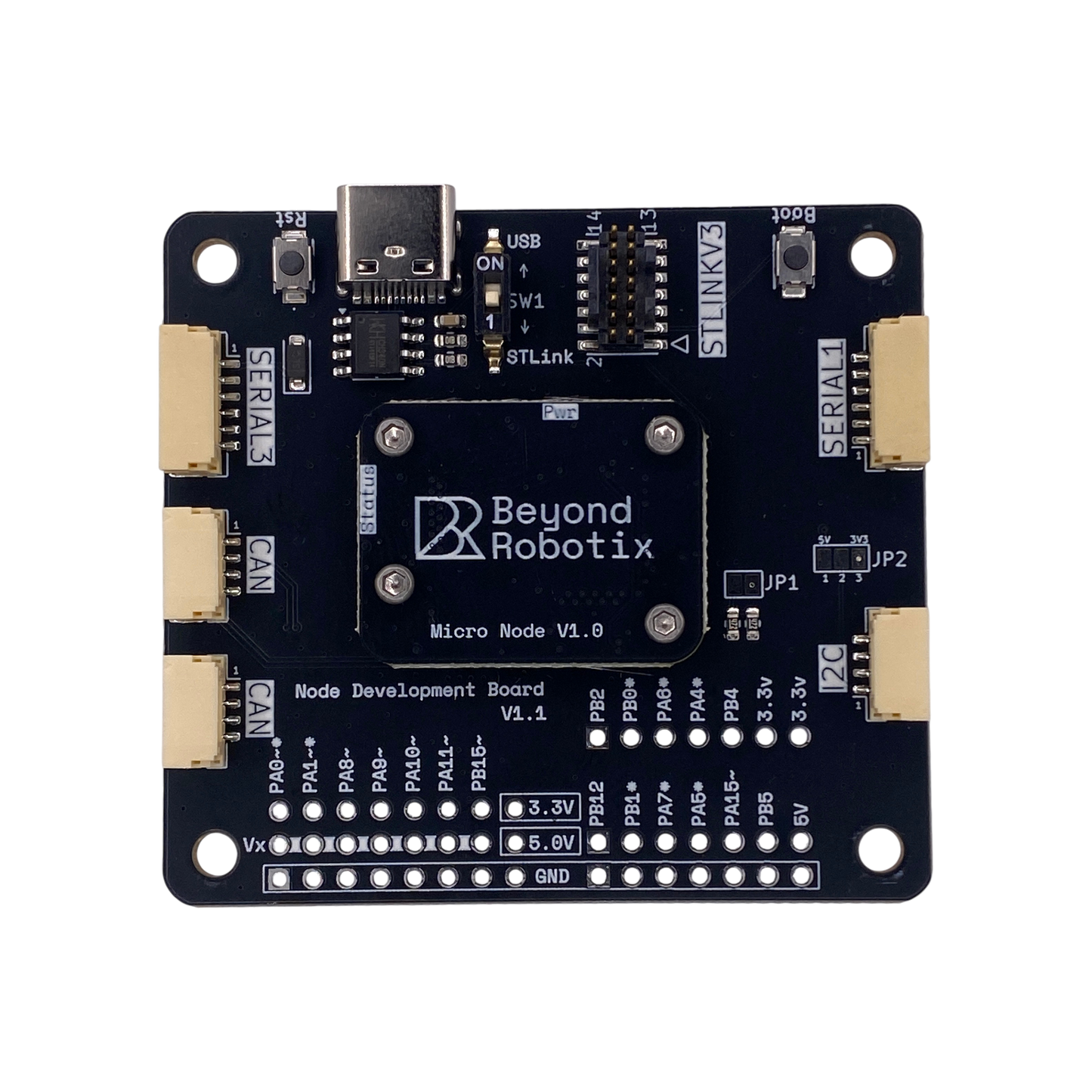
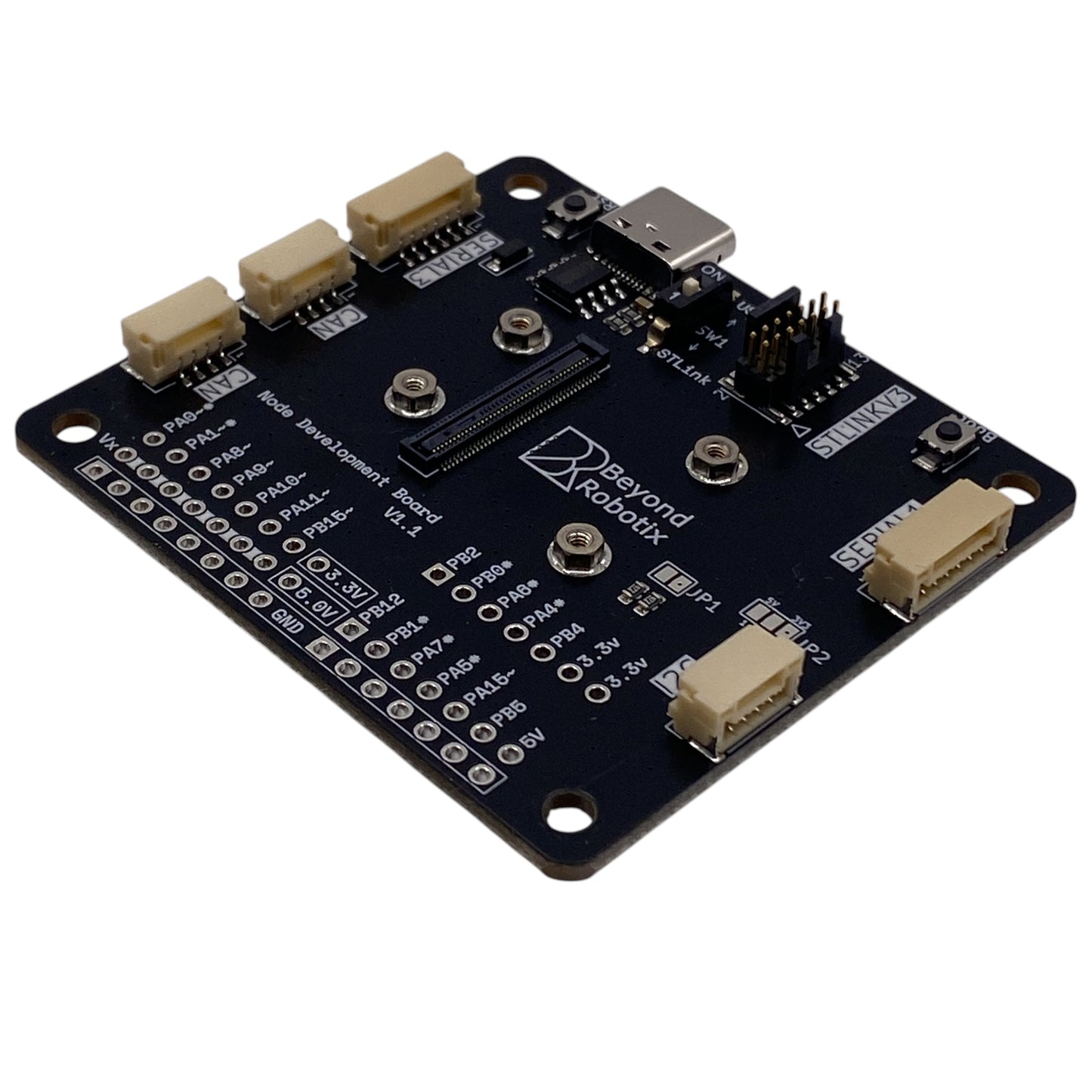
- Connectors: JST-GH 6 Pin Serial & SPI, JST-GH 4 Pin CAN & I2C, USB-C Port, STLINK-V3 Debug Header
Share
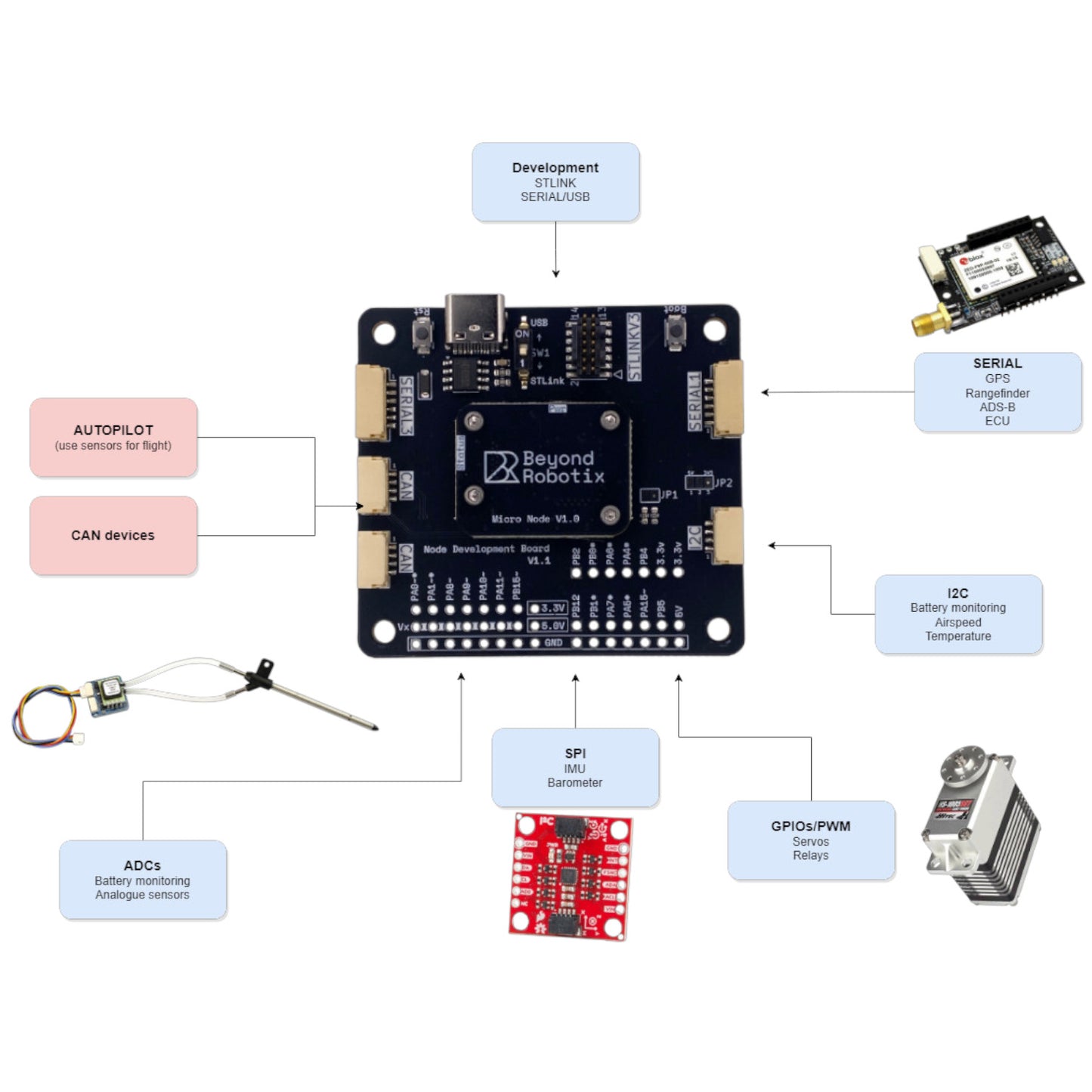

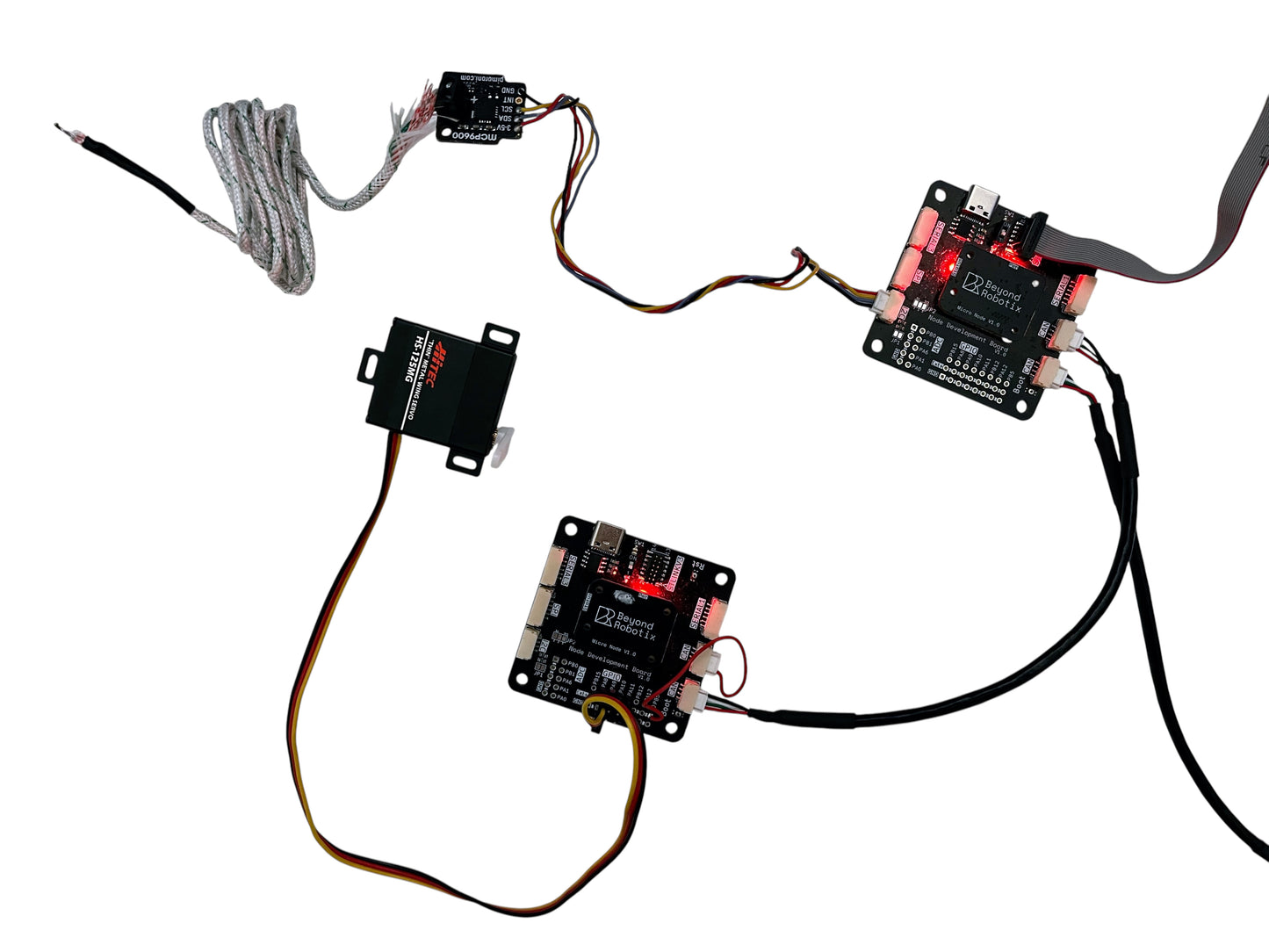

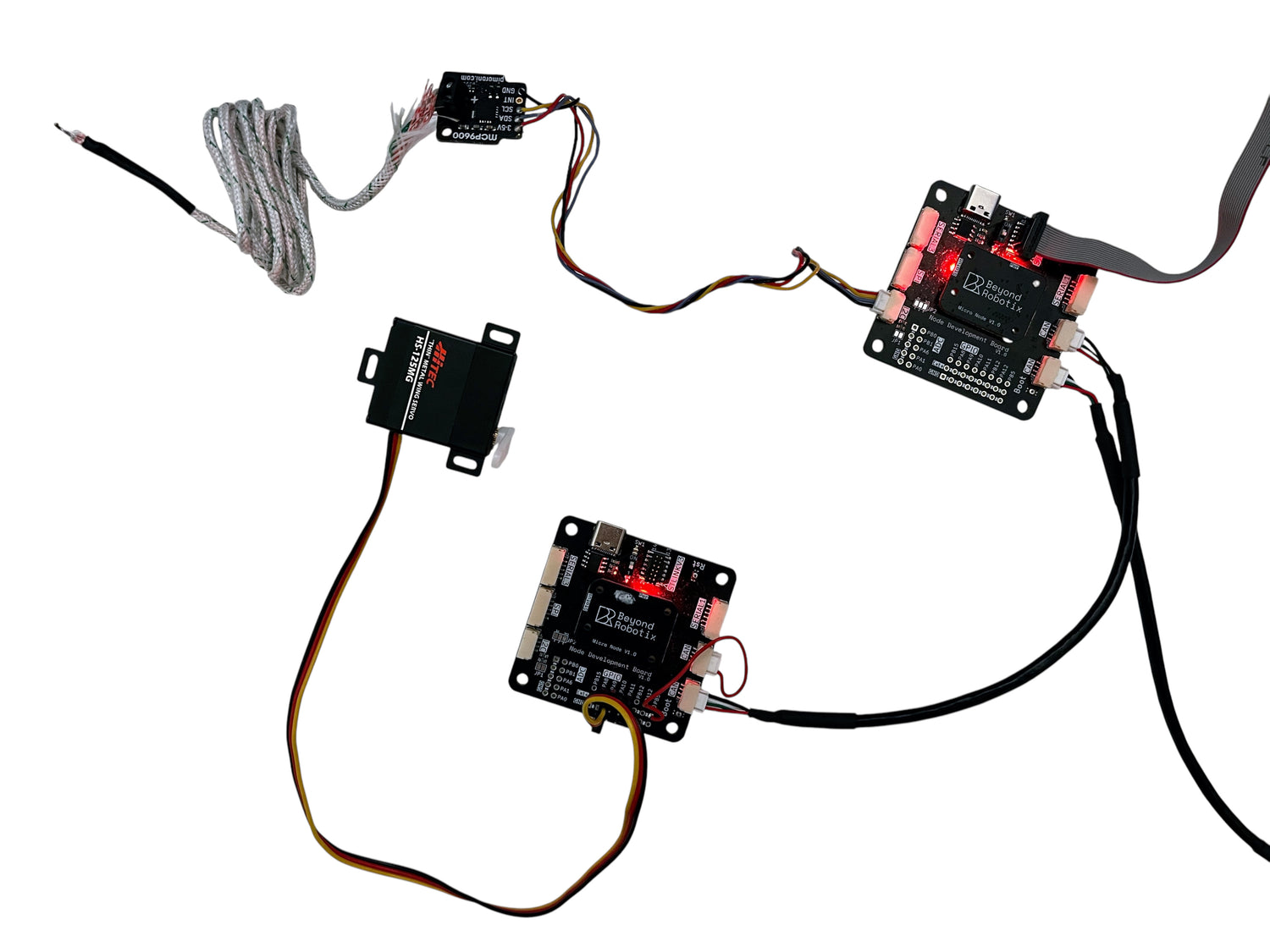
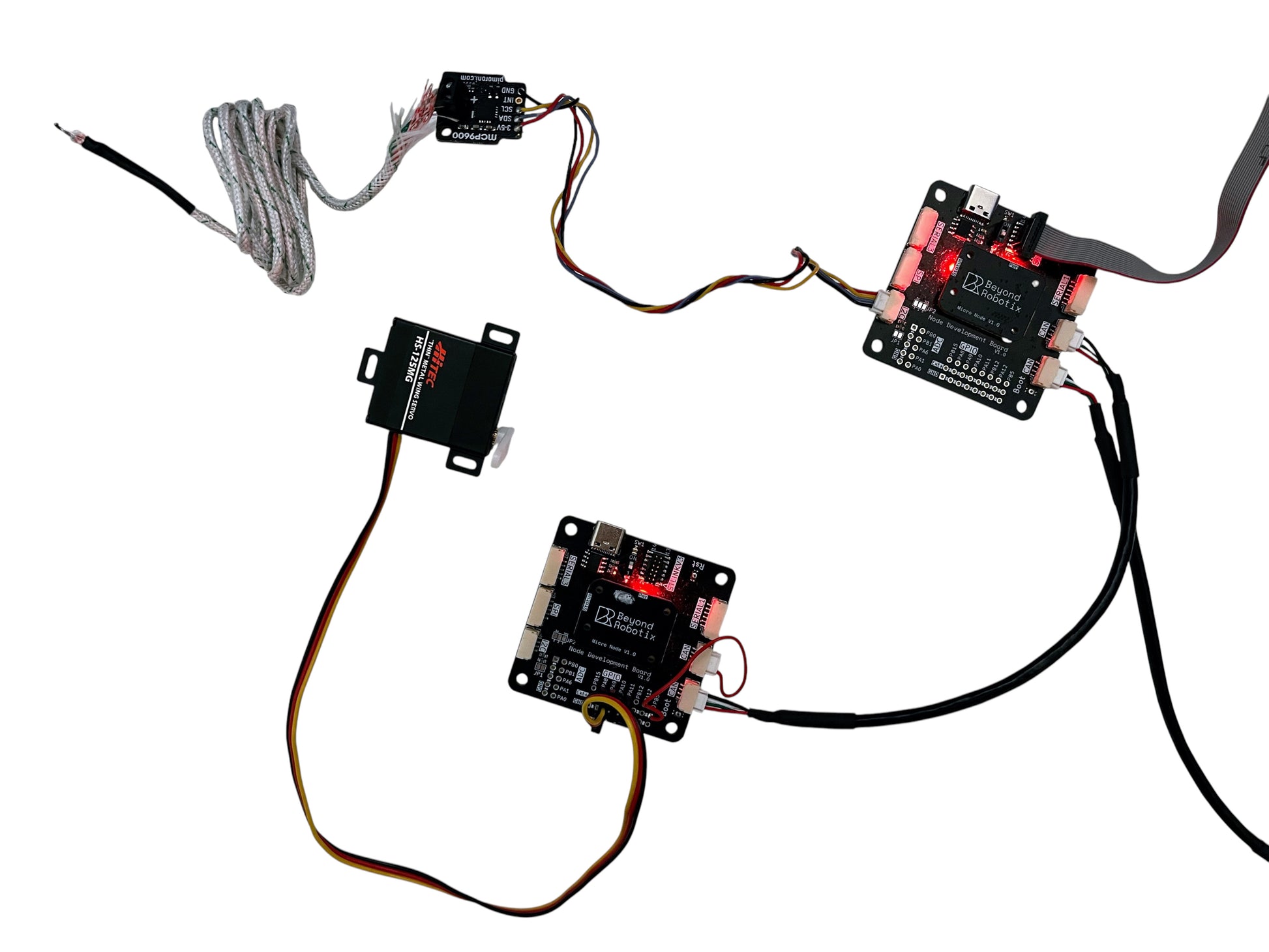
Integrate New Sensors in Minutes
Plug and play support for Arduino DroneCAN so you can integrate sensors with minimal boilerplate code. JST-GH connectors on the development board let you plug the Micro CAN Node straight into a Pixhawk or Cube flight controller and connect existing Pixhawk peripherals.
Painless Development
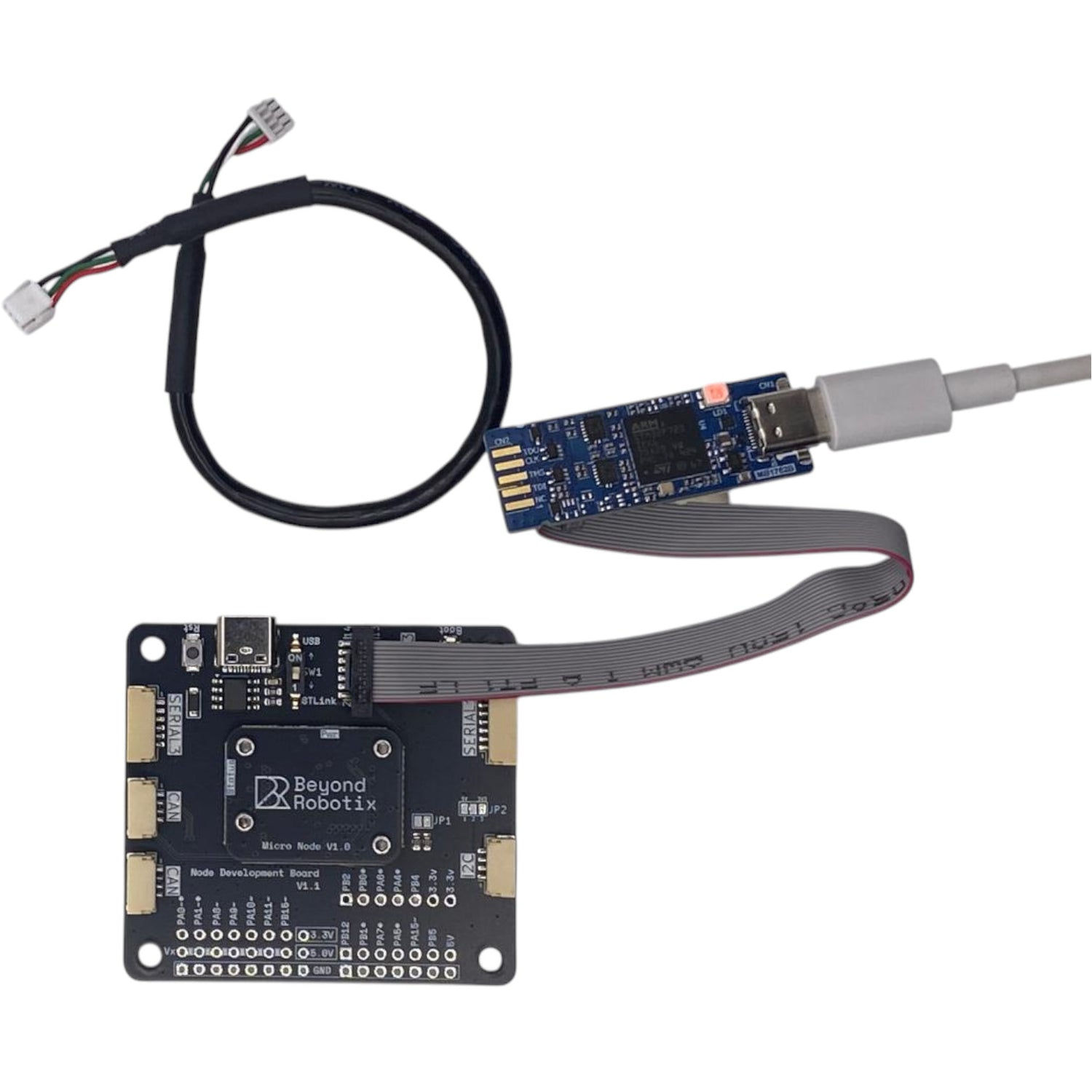
All interfaces on the Micro CAN Node are accessible through the development board with connectors or pins, including an STLINK-V3 debug header.
The STLINK header allows step by step debugging in PlatformIO, making software much easier to develop.
Extensive Documentation
Get up to speed quickly with detailed documentation from Beyond Robotix on the Micro CAN Node and Arduino DroneCAN. For any issues, you can rely on responsive customer support to get you back on track.
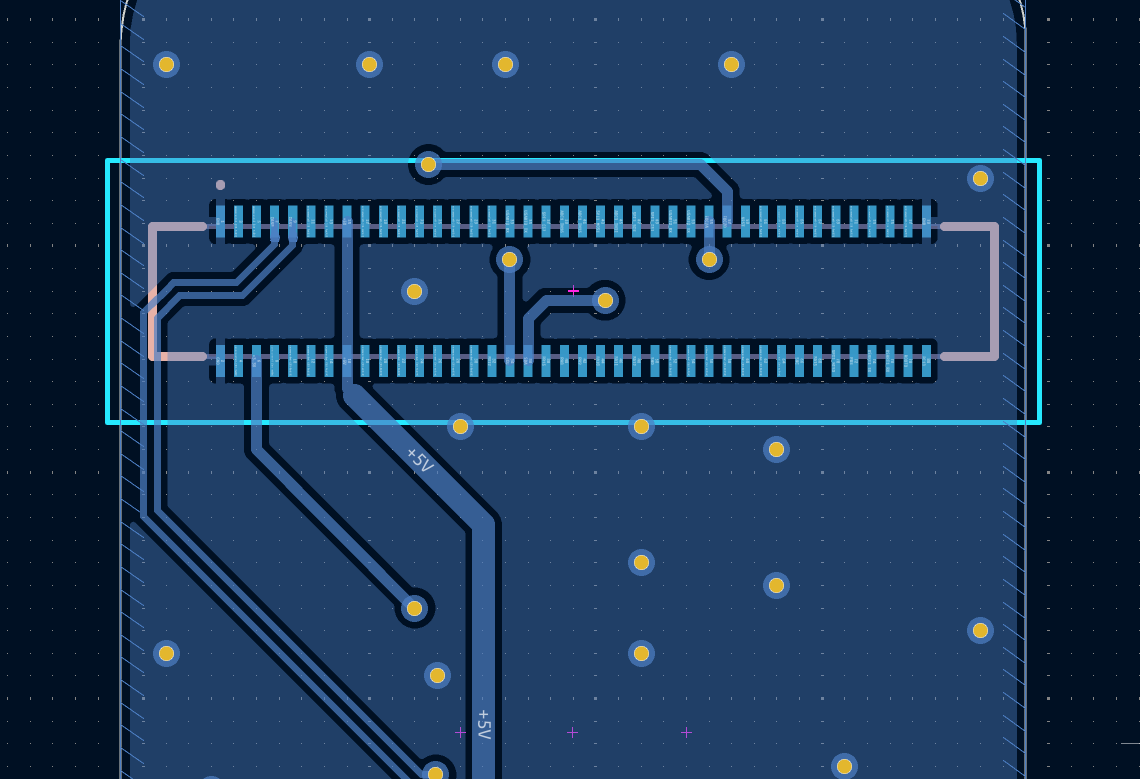
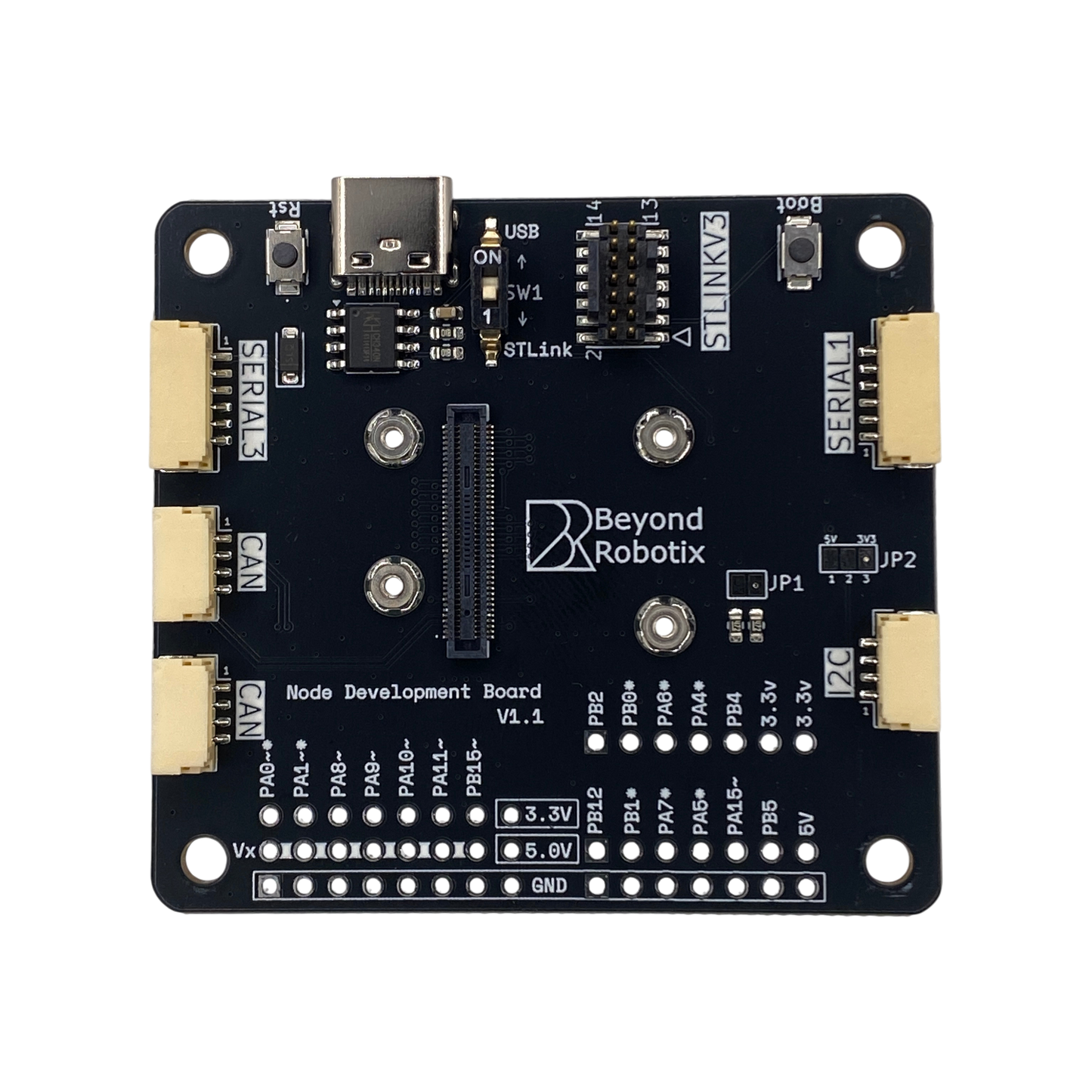
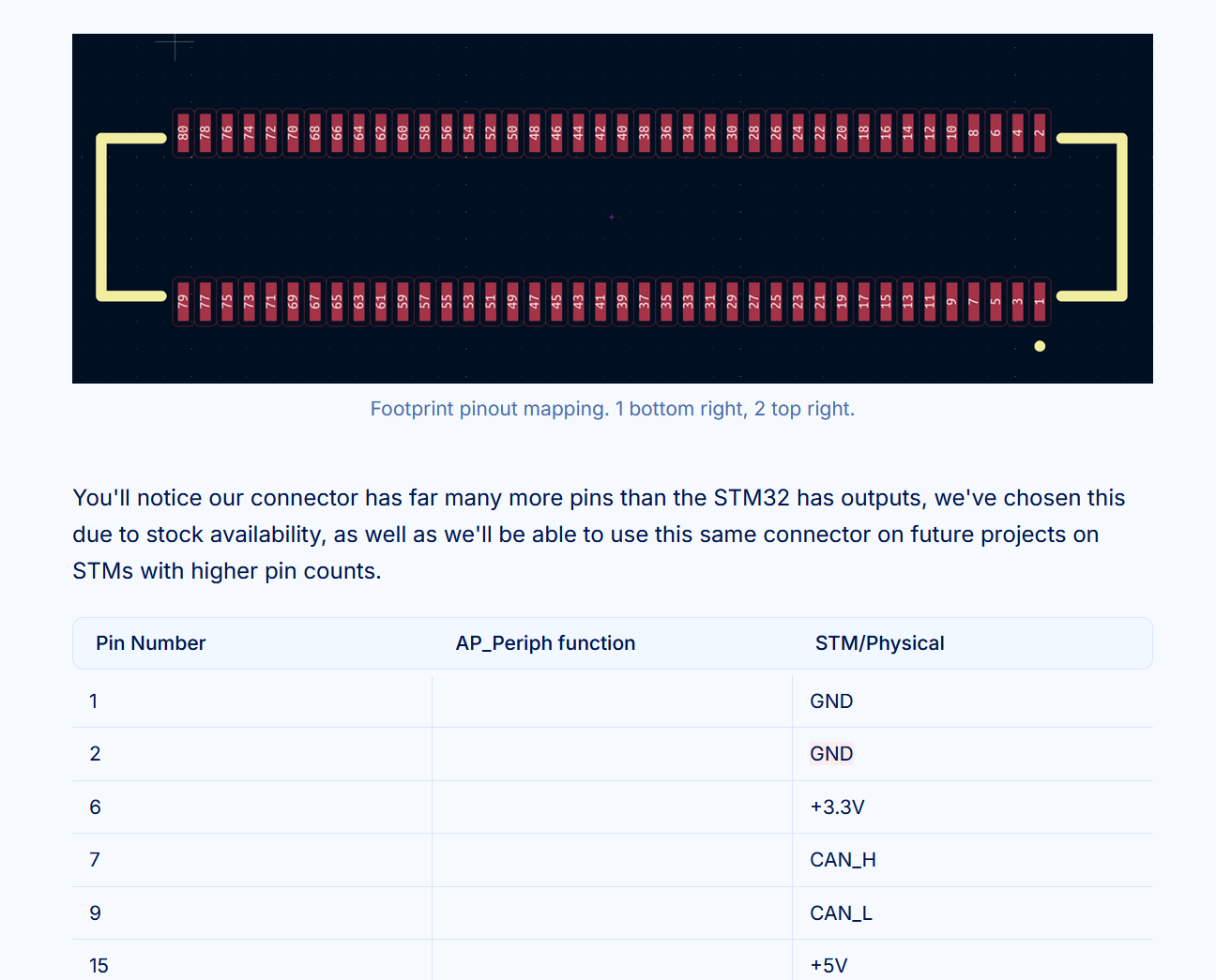
PCB integration
Integrate the Micro CAN Node easily on your avionics PCB projects using the high-density connector. This allows you to integrate a CAN node into your project without requiring stock at the PCB manufacturer, the node can be installed at product assembly time!
Get started quickly with our provided KiCad project.
FAQs
How do I write my own DroneCAN application on my CAN node?
We’ve created a library called ArduinoDroneCAN which lets you create your own custom programs to communicate with Ardupilot and PX4 via DroneCAN messages very easily. Our abstracts away the internals of DroneCAN so you can get on and just send messages when you want. We have done all the configuration files required for VScode/Platformio for the Micro CAN node which means all you need to do is press upload and you’re away.
The repository can be found here:
https://github.com/BeyondRobotix/Arduino-DroneCAN?utm_source=FAQ
How to connect custom sensors to Ardupilot using the CAN node
There’s a few different ways to connect sensors to Ardupilot, if the sensors are natively supported then AP_Periph can be used with our Micro CAN node. However, if the sensor is not supported or you want to write custom logic for your sensor, you can use our ArduinoDroneCAN software to write a driver to convert the sensor information into DroneCAN messages. The CAN node supports Serial, i2c, SPI and has multiple GPIOs, PWMs and ADC connections. Since our software stack is Arduino based, you can also use Arduino libraries to minimise the time you need to spend coding.
The repository can be found here:
https://github.com/BeyondRobotix/Arduino-DroneCAN?utm_source=FAQ
How can I allow my project to use CAN and integrate with Ardupilot and PX4?
If you’re creating custom PCBs for your project and need CAN interfaces, our Micro CAN node is designed to minimise time to market for your application. We’ve done the microcontroller design, documentation and firmware so you can just integrate the high density connector using our KiCAD template, and now your project is CAN enabled.
Documentation on CAN node integration: https://beyond-robotix.gitbook.io/docs/can-node-system/micro-node?utm_source=FAQ
Why choose to use DroneCAN for my custom project?
Ardupilot and PX4 support many ways of inputting and outputting data for all types of uncrewed aircraft and ground vehicles.
- Lua scripts can be used to write device drivers without any extra hardware, and support for scripting in Ardupilot has increased significantly. However, you’re limited to the Lua language which is basic and performance limits can be reached with a few complex scripts running. Scripting is not supported in PX4, which means your solution would not be transferable.
- Another option is to write your own device driver native for PX4/Ardupilot, however, the implementation would need to be different for each and this requires modifying source files for the autopilot which has licensing issues for Ardupilot and potentially could introduce bugs threatening the autopilot functionality. Re-flight trialing flight firmware can become very time consuming depending on the scale and complexity of your project.
- MAVLINK can be used in some cases, however not all functionality is not supported through Ardupilot, for example airspeed data cannot be ingested into Ardupilot through MAVLINK messages. MAVLINK would also require a dedicated serial port, which can become limiting depending on the complexity of your project.
However, DroneCAN is transferable between both PX4 and Ardupilot and doesn’t require any modification of programs running on the autopilot. This means you can iterate quickly independently of the autopilot. Many functionalities are also supported on DroneCAN from GPS to EFI messages. Ardupilot/PX4 can also command external devices with no modification using servo or relay commands. If there are other devices on your CAN network, such as GPS or airspeed then your new custom CAN device can access these messages and utilise them in your application if wanted.
Previously, utilising DroneCAN for your project would have been complicated - however with our Micro CAN node and ArduinoDroneCAN library, you can get going within minutes!
Get Started Today
Discover why the Beyond Robotix Micro CAN Node is the perfect option for your DroneCAN projects. Order now and take your sensor integration to the next level.